|
JSBSim Flight Dynamics Model
1.1.11 (13 Feb 2022)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model
1.1.11 (13 Feb 2022)
An Open Source Flight Dynamics and Control Software Library in C++
|
Encapsulates an Actuator component for the flight control system.
The actuator can be modeled as a "perfect actuator", with the Output being set directly to the input. The actuator can be made more "real" by specifying any/all of the following additional effects that can be applied to the actuator. In order of application to the input signal, these are:
There are also several malfunctions that can be applied to the actuator by setting a property to true or false (or 1 or 0).
Rate limits can be specified either as a single number or property. If a single <rate_limit> is supplied (with no "sense" attribute) then the actuator is rate limited at +/- the specified rate limit. If the <rate_limit> element is supplied with a "sense" attribute of either "incr[easing]" or "decr[easing]" then the actuator is limited to the provided numeric or property value) exactly as provided.
Lag filter's numerical integration assumes that the lag parameter is constant. So a continuously varying parameter via a property will introduce a non negligible error that will accumulate as the simulation progresses.
Syntax:
Example:
Definition at line 127 of file FGActuator.h.
#include <FGActuator.h>
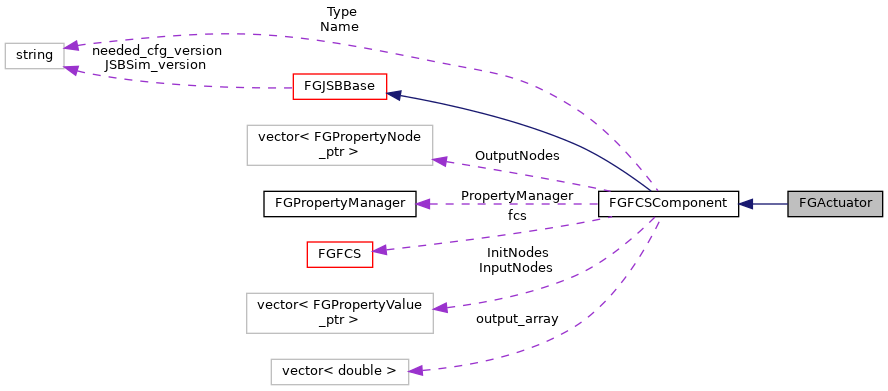
 Inheritance diagram for FGActuator: Collaboration diagram for FGActuator:
Inheritance diagram for FGActuator: Collaboration diagram for FGActuator:Public Member Functions | |
| FGActuator (FGFCS *fcs, Element *element) | |
| Constructor. | |
| ~FGActuator () | |
| Destructor. | |
| bool | GetFailHardover (void) const |
| bool | GetFailStuck (void) const |
| bool | GetFailZero (void) const |
| bool | IsSaturated (void) const |
| void | ResetPastStates (void) override |
| bool | Run (void) override |
| This function processes the input. More... | |
| void | SetFailHardover (bool set) |
| void | SetFailStuck (bool set) |
| void | SetFailZero (bool set) |
| This function fails the actuator to zero. More... | |
| Public Member Functions inherited from FGFCSComponent | |
| FGFCSComponent (FGFCS *fcs, Element *el) | |
| Constructor. | |
| virtual | ~FGFCSComponent () |
| Destructor. | |
| std::string | GetName (void) const |
| double | GetOutput (void) const |
| virtual double | GetOutputPct (void) const |
| std::string | GetType (void) const |
| virtual void | SetOutput (void) |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | PutMessage (const Message &msg) |
| Places a Message structure on the Message queue. More... | |
| void | PutMessage (const std::string &text) |
| Creates a message with the given text and places it on the queue. More... | |
| void | PutMessage (const std::string &text, bool bVal) |
| Creates a message with the given text and boolean value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, int iVal) |
| Creates a message with the given text and integer value and places it on the queue. More... | |
| void | PutMessage (const std::string &text, double dVal) |
| Creates a message with the given text and double value and places it on the queue. More... | |
| int | SomeMessages (void) const |
| Reads the message on the queue (but does not delete it). More... | |
| void | ProcessMessage (void) |
| Reads the message on the queue and removes it from the queue. More... | |
| Message * | ProcessNextMessage (void) |
| Reads the next message on the queue and removes it from the queue. More... | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
Additional Inherited Members | |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1, eM, eN } |
| Moments L, M, N. | |
| enum | { eP = 1, eQ, eR } |
| Rates P, Q, R. | |
| enum | { eU = 1, eV, eW } |
| Velocities U, V, W. | |
| enum | { eX = 1, eY, eZ } |
| Positions X, Y, Z. | |
| enum | { ePhi = 1, eTht, ePsi } |
| Euler angles Phi, Theta, Psi. | |
| enum | { eDrag = 1, eSide, eLift } |
| Stability axis forces, Drag, Side force, Lift. | |
| enum | { eRoll = 1, ePitch, eYaw } |
| Local frame orientation Roll, Pitch, Yaw. | |
| enum | { eNorth = 1, eEast, eDown } |
| Local frame position North, East, Down. | |
| enum | { eLat = 1, eLong, eRad } |
| Locations Radius, Latitude, Longitude. | |
| enum | { inNone = 0, inDegrees, inRadians, inMeters, inFeet } |
| Conversion specifiers. | |
| Static Public Member Functions inherited from FGJSBBase | |
| static const std::string & | GetVersion (void) |
| Returns the version number of JSBSim. More... | |
| static constexpr double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. More... | |
| static constexpr double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. More... | |
| static constexpr double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. More... | |
| static constexpr double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. More... | |
| static constexpr double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. More... | |
| static constexpr double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. More... | |
| static constexpr double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. More... | |
| static constexpr double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. More... | |
| static constexpr double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. More... | |
| static constexpr double | FeetToMeters (double measure) |
| Converts from feet to meters. More... | |
| static double | PitotTotalPressure (double mach, double p) |
| Compute the total pressure in front of the Pitot tube. More... | |
| static double | MachFromImpactPressure (double qc, double p) |
| Compute the Mach number from the differential pressure (qc) and the static pressure. More... | |
| static double | VcalibratedFromMach (double mach, double p) |
| Calculate the calibrated airspeed from the Mach number. More... | |
| static double | MachFromVcalibrated (double vcas, double p) |
| Calculate the Mach number from the calibrated airspeed.Based on the formulas in the US Air Force Aircraft Performance Flight Testing Manual (AFFTC-TIH-99-01). More... | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. More... | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. More... | |
| static constexpr double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static constexpr double | sign (double num) |
| static double | GaussianRandomNumber (void) |
| Static Public Attributes inherited from FGJSBBase | |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| static short | debug_lvl = 1 |
| Protected Member Functions inherited from FGFCSComponent | |
| void | CheckInputNodes (size_t MinNodes, size_t MaxNodes, Element *el) |
| void | Clip (void) |
| void | Delay (void) |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Protected Attributes inherited from FGFCSComponent | |
| bool | clip |
| FGParameter_ptr | ClipMax |
| FGParameter_ptr | ClipMin |
| bool | cyclic_clip |
| unsigned int | delay |
| double | delay_time |
| double | dt |
| FGFCS * | fcs |
| int | index |
| std::vector< FGPropertyValue_ptr > | InitNodes |
| double | Input |
| std::vector< FGPropertyValue_ptr > | InputNodes |
| std::string | Name |
| double | Output |
| std::vector< double > | output_array |
| std::vector< FGPropertyNode_ptr > | OutputNodes |
| FGPropertyManager * | PropertyManager |
| std::string | Type |
| Static Protected Attributes inherited from FGJSBBase | |
| static Message | localMsg |
| static std::queue< Message > | Messages |
| static unsigned int | messageId = 0 |
| static constexpr double | radtodeg = 180. / M_PI |
| static constexpr double | degtorad = M_PI / 180. |
| static constexpr double | hptoftlbssec = 550.0 |
| static constexpr double | psftoinhg = 0.014138 |
| static constexpr double | psftopa = 47.88 |
| static constexpr double | ktstofps = 1.68781 |
| static constexpr double | fpstokts = 1.0 / ktstofps |
| static constexpr double | inchtoft = 1.0/12.0 |
| static constexpr double | fttom = 0.3048 |
| static constexpr double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static constexpr double | in3tom3 = inchtoft*inchtoft*inchtoft/m3toft3 |
| static constexpr double | inhgtopa = 3386.38 |
| static constexpr double | slugtolb = 32.174049 |
| Note that definition of lbtoslug by the inverse of slugtolb and not to a different constant you can also get from some tables will make lbtoslug*slugtolb == 1 up to the magnitude of roundoff. More... | |
| static constexpr double | lbtoslug = 1.0/slugtolb |
| static constexpr double | kgtolb = 2.20462 |
| static constexpr double | kgtoslug = 0.06852168 |
| static const std::string | needed_cfg_version = "2.0" |
| static const std::string | JSBSim_version = JSBSIM_VERSION " " __DATE__ " " __TIME__ |
| static int | gaussian_random_number_phase = 0 |
|
overridevirtual |
This function processes the input.
It calls private functions if needed to perform the hysteresis, lag, limiting, etc. functions.
Reimplemented from FGFCSComponent.
Definition at line 143 of file FGActuator.cpp.
|
inline |
This function fails the actuator to zero.
The motion to zero will flow through the lag, hysteresis, and rate limiting functions if those are activated.
Definition at line 145 of file FGActuator.h.
 1.8.17
1.8.17